https://arxiv.org/abs/2202.07008

In 21st International Conference on Advanced Robotics (ICAR) 2023
February 2024
In 21st International Conference on Advanced Robotics (ICAR) 2023
February 2024
https://doi.org/10.48550/arXiv.2401.17732

In IEEE Design, Automation and Test in Europe Conference, Valencia 2024
January 2024
In IEEE Design, Automation and Test in Europe Conference, Valencia 2024
January 2024
In 2023 IEEE/RSJ International Conference on Intelligent Robots and
Systems
(IROS)
December 2023
In 2023 IEEE/RSJ International Conference on Intelligent Robots and
Systems
(IROS)
December 2023
In IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS)
2023
December 2023

In IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS)
2023
December 2023
In IEEE International Conference on Robotics and Automation
September 2023
In IEEE International Conference on Robotics and Automation
September 2023
In IEEE 9th World Forum on Internet of Things, Aveiro 2023
September 2023
In IEEE 9th World Forum on Internet of Things, Aveiro 2023
September 2023
In Machine Learning with Applications 14 (2023)
September 2023
In Machine Learning with Applications 14 (2023)
September 2023
In IEEE Letters
September 2023

In IEEE Letters
September 2023
In IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS)
2023
September 2023

In IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS)
2023
September 2023
In IEEE Robotics and Automation Letters
July 2023

In IEEE Robotics and Automation Letters
July 2023
In IEEE International Conference on Robotics and Automation (ICRA),
London
2023
July 2023

In IEEE International Conference on Robotics and Automation (ICRA),
London
2023
July 2023
In 9th International Workshop on Advances in Sensors and Interfaces
(IWASI)
2023
July 2023
In 9th International Workshop on Advances in Sensors and Interfaces
(IWASI)
2023
July 2023
In Cognitive Robotics 3 (2023)
April 2023
In Cognitive Robotics 3 (2023)
April 2023
Journal article in Field Robotics
April 2023
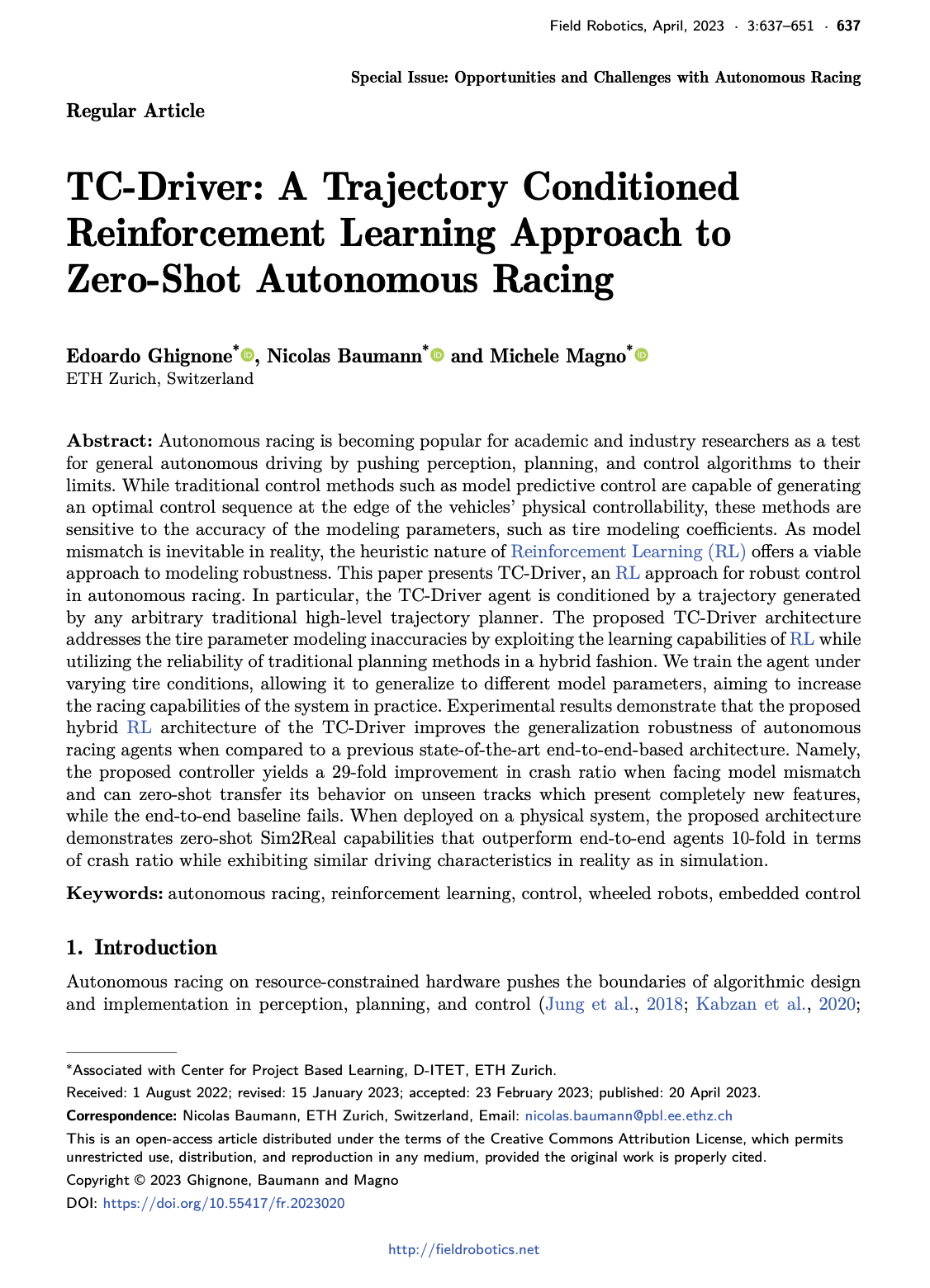
Journal article in Field Robotics
April 2023
In Design, Automation and Testing in Europe, 2022
March 2022

In Design, Automation and Testing in Europe, 2022
March 2022
In Intelligent Robots and Systems (IROS)
December 2022

In Intelligent Robots and Systems (IROS)
December 2022
In Intelligent Robots and Systems (IROS)
December 2022

In Intelligent Robots and Systems (IROS)
December 2022
In International Conference on Autonomous Agents and Multiagent Systems
(AAMAS)
May 2022
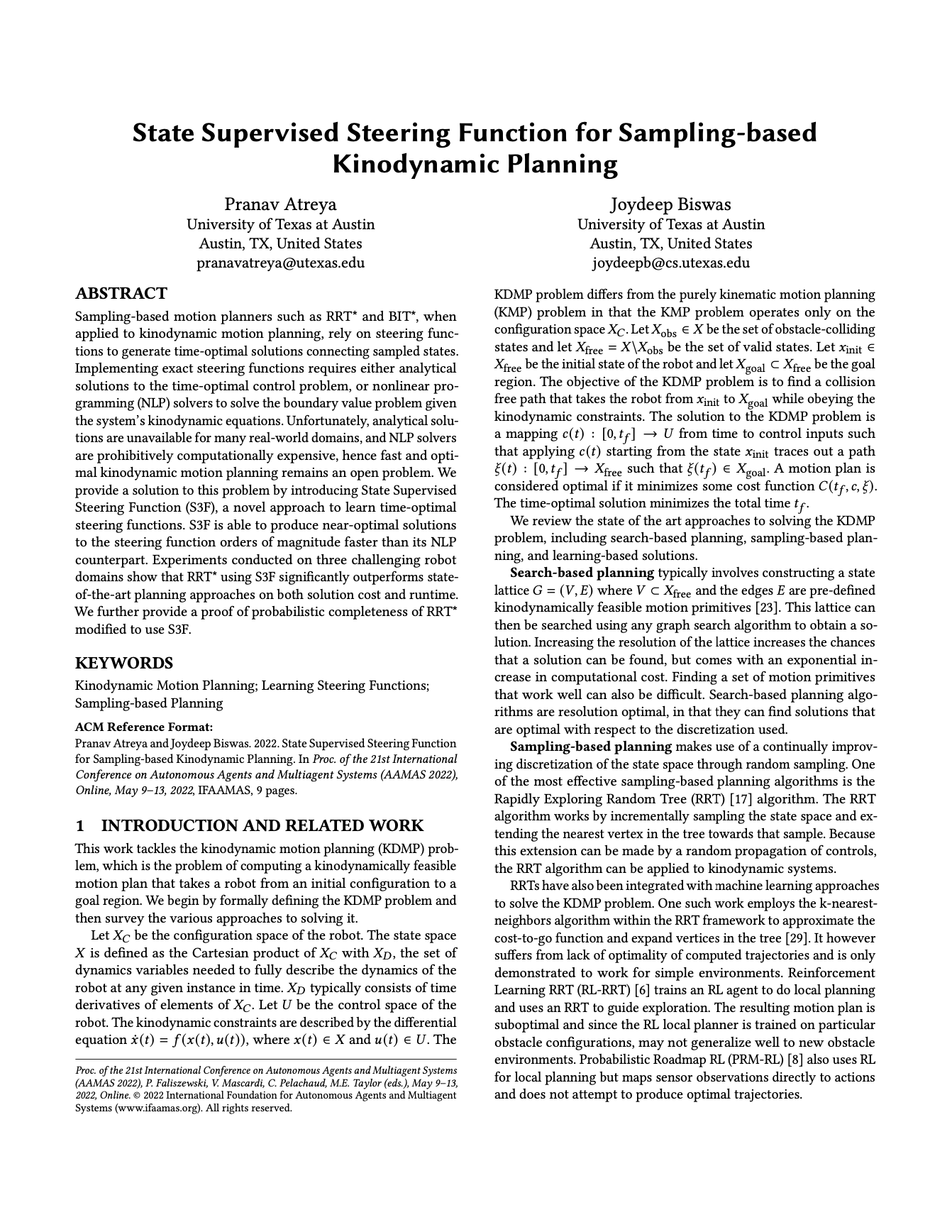
In International Conference on Autonomous Agents and Multiagent Systems
(AAMAS)
May 2022
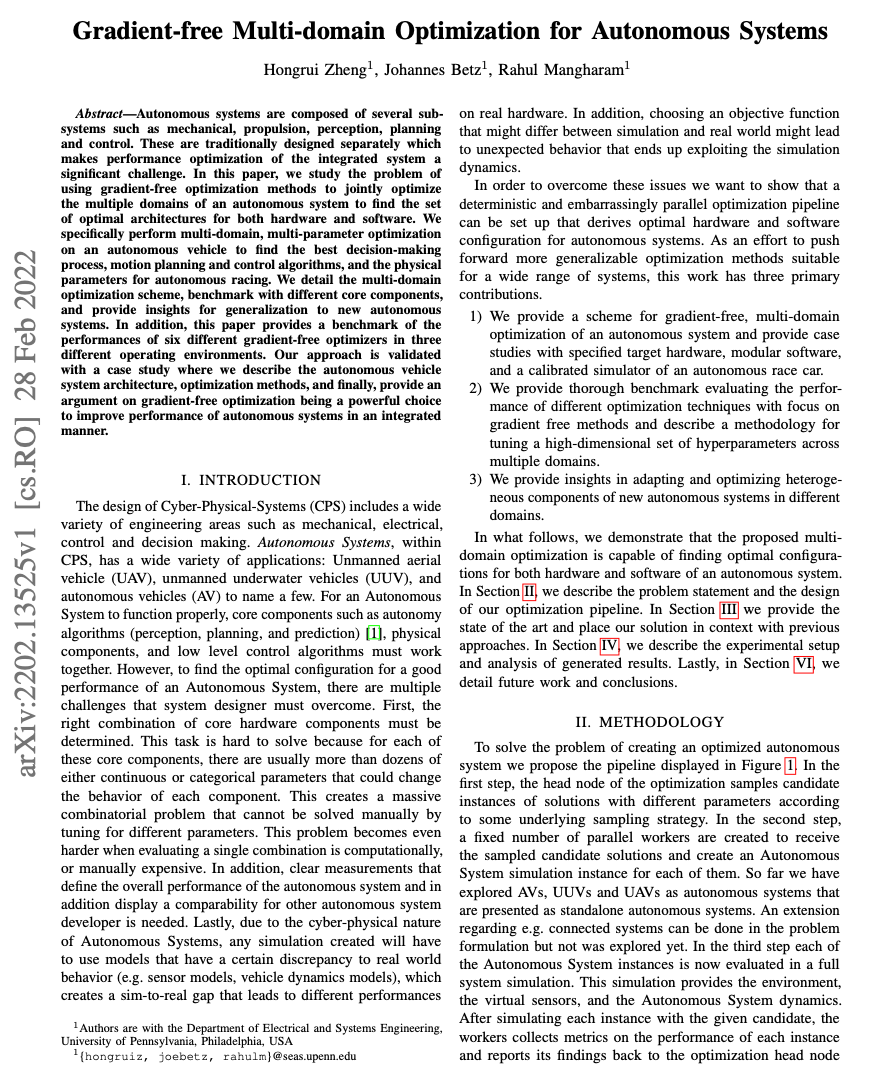
https://arxiv.org/abs/2202.13525
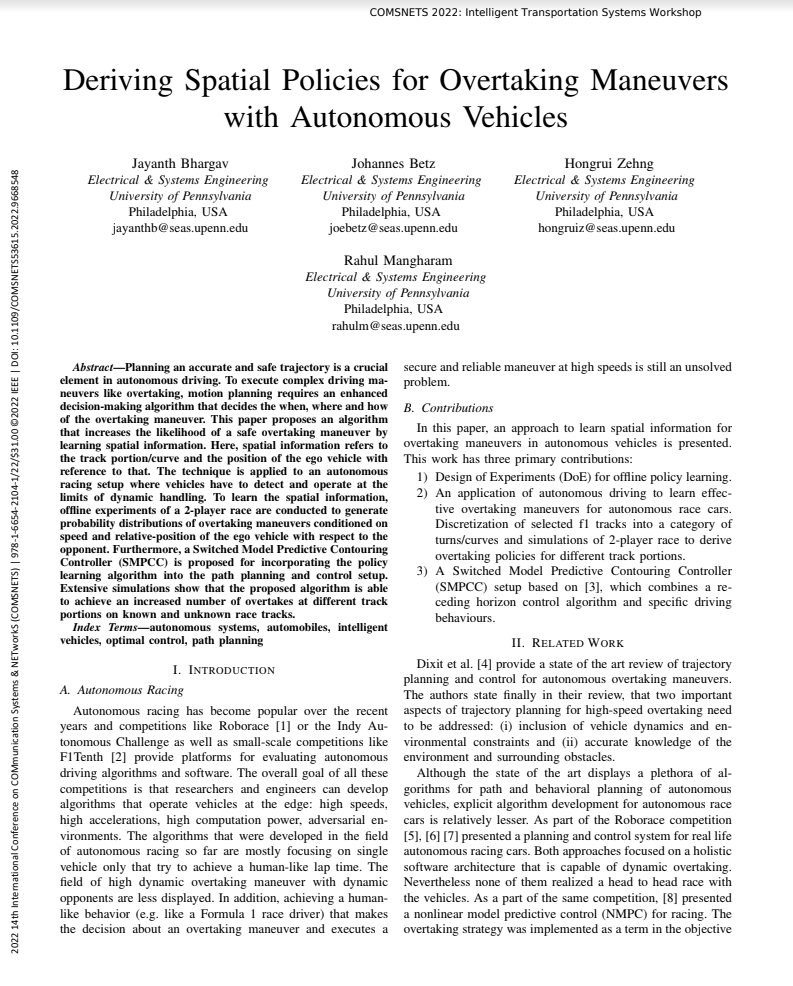
In IEEE 14th International Conference on COMmunication Systems &
NETworkS
(COMSNETS)
January 2022
In IEEE COMSNETS
January 2022
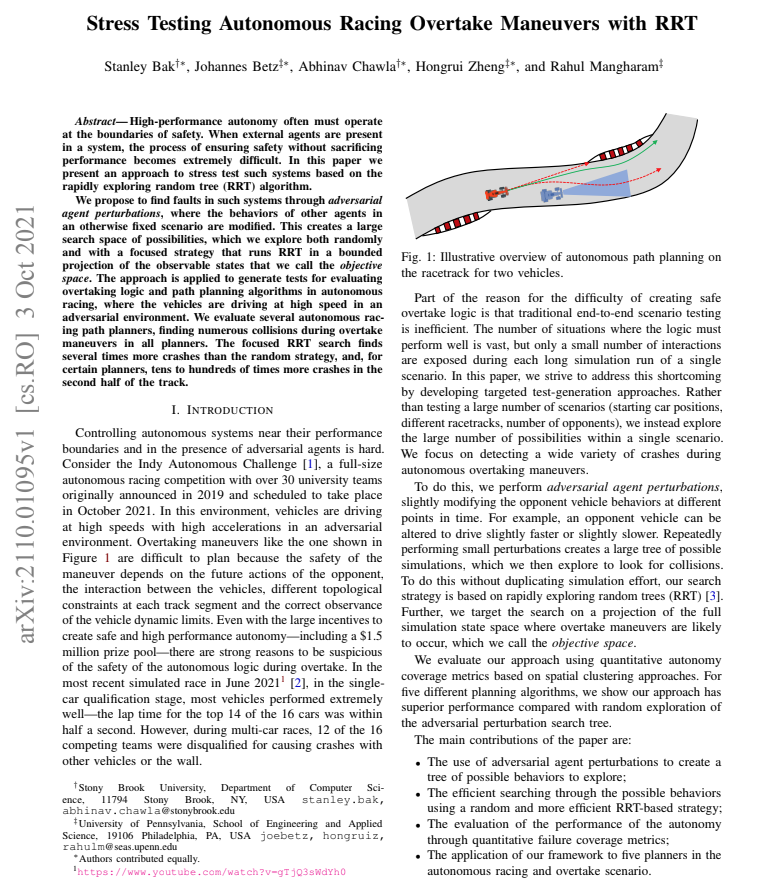
https://www.researchgate.net/publication/355060757_Stress_Testing_Autonomous_Racing_Overtake_Maneuvers_with_RRT
In Intelligent Robots and Systems (IROS)
December 2021

In Intelligent Robots and Systems (IROS)
December 2021
In IEEE Robotics and Automation Letters (RA-L)
June 2021
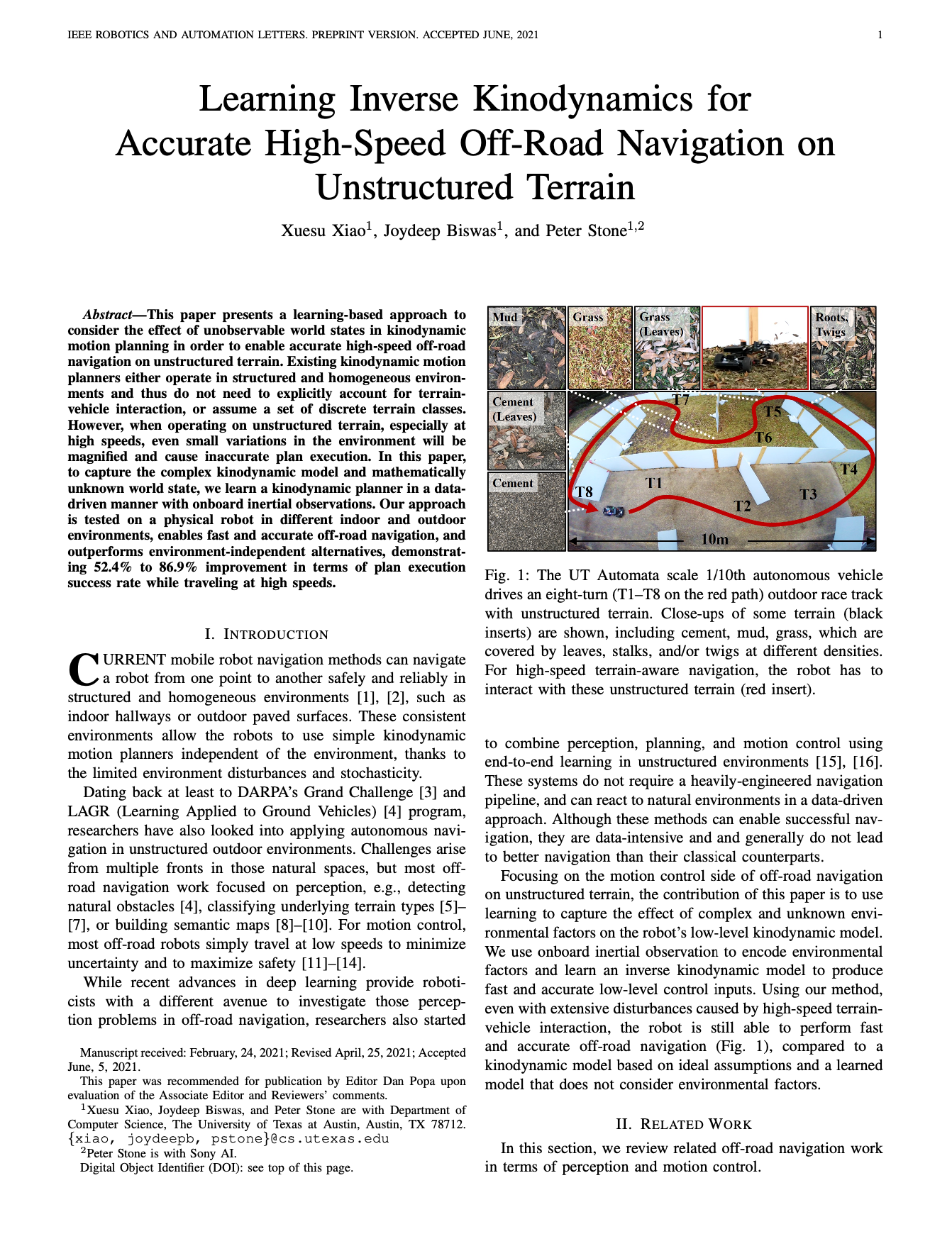
In IEEE Robotics and Automation Letters (RA-L)
June 2021
In IEEE Design & Test
July 2020
In IEEE Design & Test
July 2020


In 2020 International Conference on Robotics and Automation (ICRA)
June 2020

In 2020 International Conference on Robotics and Automation (ICRA)
June 2020
In 23rd ACM International Conference on Hybrid Systems: Computation and
Control
April 2020
In 23rd ACM International Conference on Hybrid Systems: Computation and
Control
April 2020



In ACM Special Interest Group on Computer Science Education (SIGCSE)
Runner up, best paper
January 2020